Posts tagged: mobility

Open Traffic platform released
A year ago, Mapzen set out of an adventure the World Bank and their partners to create a global platform for turning anonymous GPS locations into roadway speeds, called Open Traffic. Now, we've finished our work on the platform and are pleased to hand Open Traffic to World Bank for operation.

OSMLR hits a "mile marker" (and joins AWS Public Datasets)
Mapzen is collaborating with Amazon Web Services to release OSMLR segments through their Public Datasets program. Use OSMLR segments and IDs to attach your dynamic data to almost any stretch of roadways in OpenStreetMap, anywhere in the world.
Analyzing historical transit service & GTFS publishing practices in Transitland
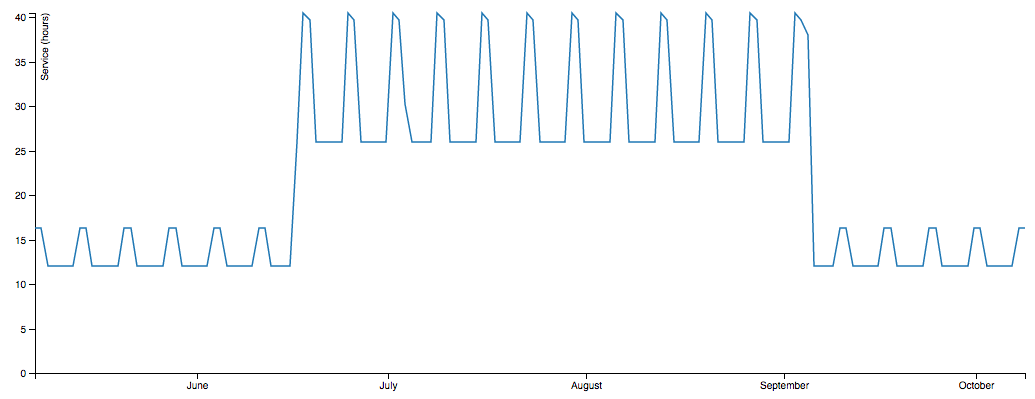
This summer we added 3,000 historical GTFS feed versions to Transitland, stretching back to 2008. Interesting patterns are emerging!
A "data-driven" approach to improving map-matching: Part IV — Map-Matching and the Built Environment
The final part of a series on how Mapzen validates, fine tunes, and deploys our map-matching, in support of the Open Traffic platform and other applications.
A "data-driven" approach to improving map-matching, Part III -- Post-processing for Quality
In part three of how Mapzen validates, fine tunes, and deploys our map-matching, we'll describe how we ensure that only the best-quality matches make their way into the Open Traffic datastore.
A "data-driven" approach to improving map-matching, Part II
In part two of how Mapzen validates, fine tunes, and deploys our map-matching, we'll dive a bit deeper into the internals of the algorithm itself to see how we can use our validation metrics to fine-tune the map-matching parameters.
TransitFlow — using Python and Processing to visualize regional transit frequency
Transitflow is an experimental set of tools that generate spatial-temporal transit frequency datasets and visualizations from the command line.
New and improved bike routing, with low stress options
This summer, we have enhanced bicycle costing. Not only is overall routing improved, but `use_roads'` and `use_hills` are now much more versatile.